
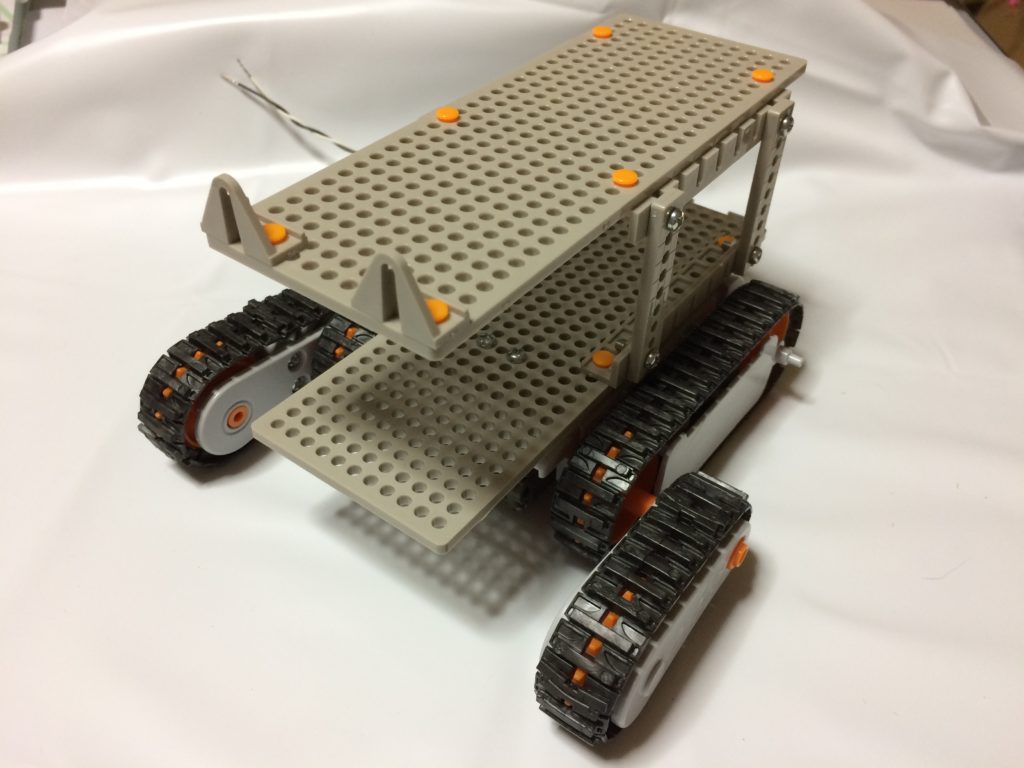
今回は、書籍「Raspberry Piで学ぶ電子工作」掲載の、Raspberry Pi3を搭載した「キャタピラ式模型」の骨格、2段になったパーツ格納スペースを製作します。
ツインモーター内蔵アームクローラーの上に載せる部分です。
とりあえずは完成させる事を優先して、本の内容とそっくりの物を作ります。
全体の製作手順と、実際に作業してみて初めてわかった、作り方のポイントを中心に説明します。
今回必要な物は下記の2点です。
作業の流れは以下のとおり。
①必要なパーツを揃える
②パーツを加工する
③組み立てる
①必要なパーツを揃える
ここで準備しておくものは下記のとおり。
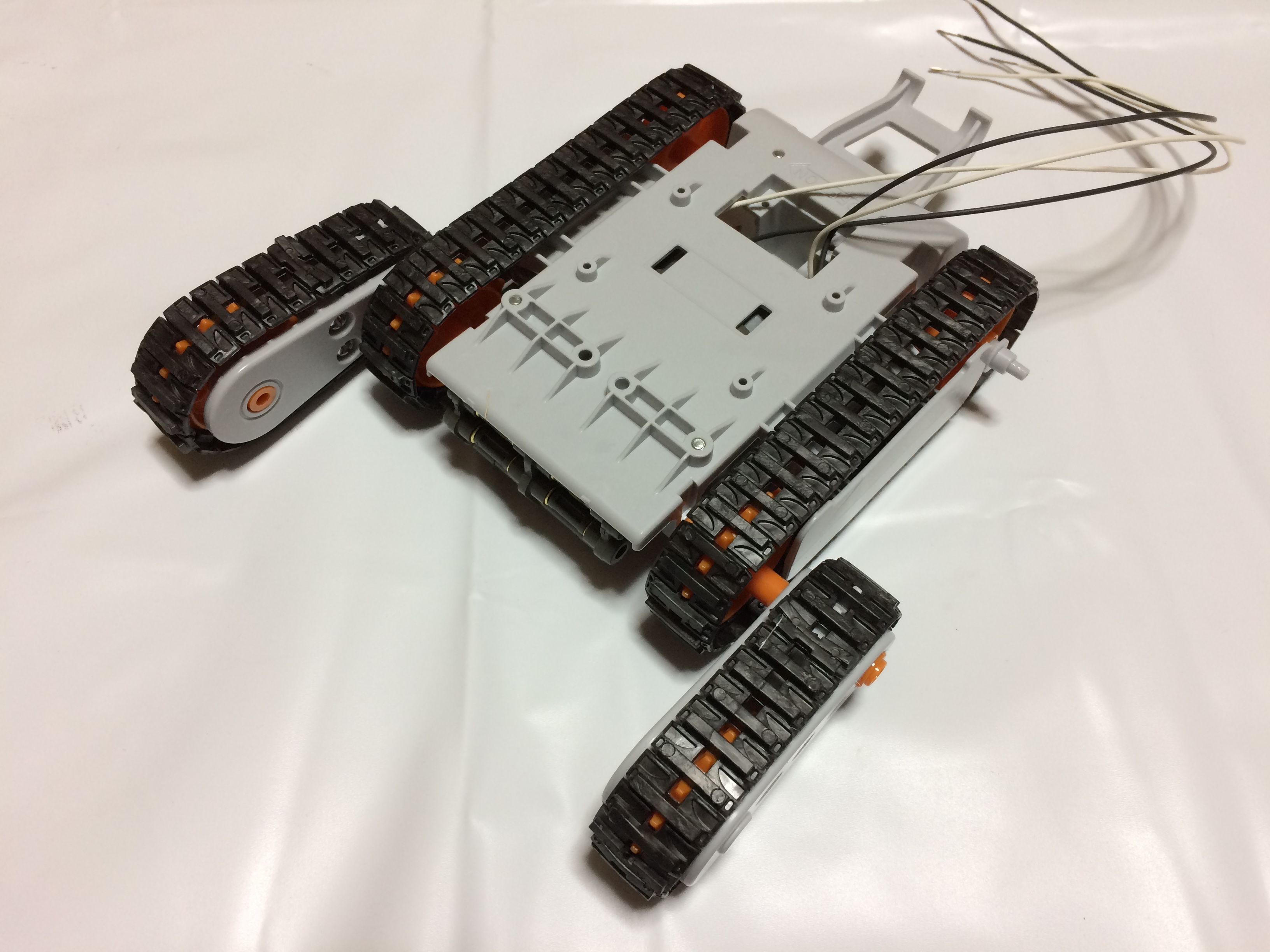
・前回の記事で製作したツインモーターギヤーボックス内蔵のアームクローラー本体
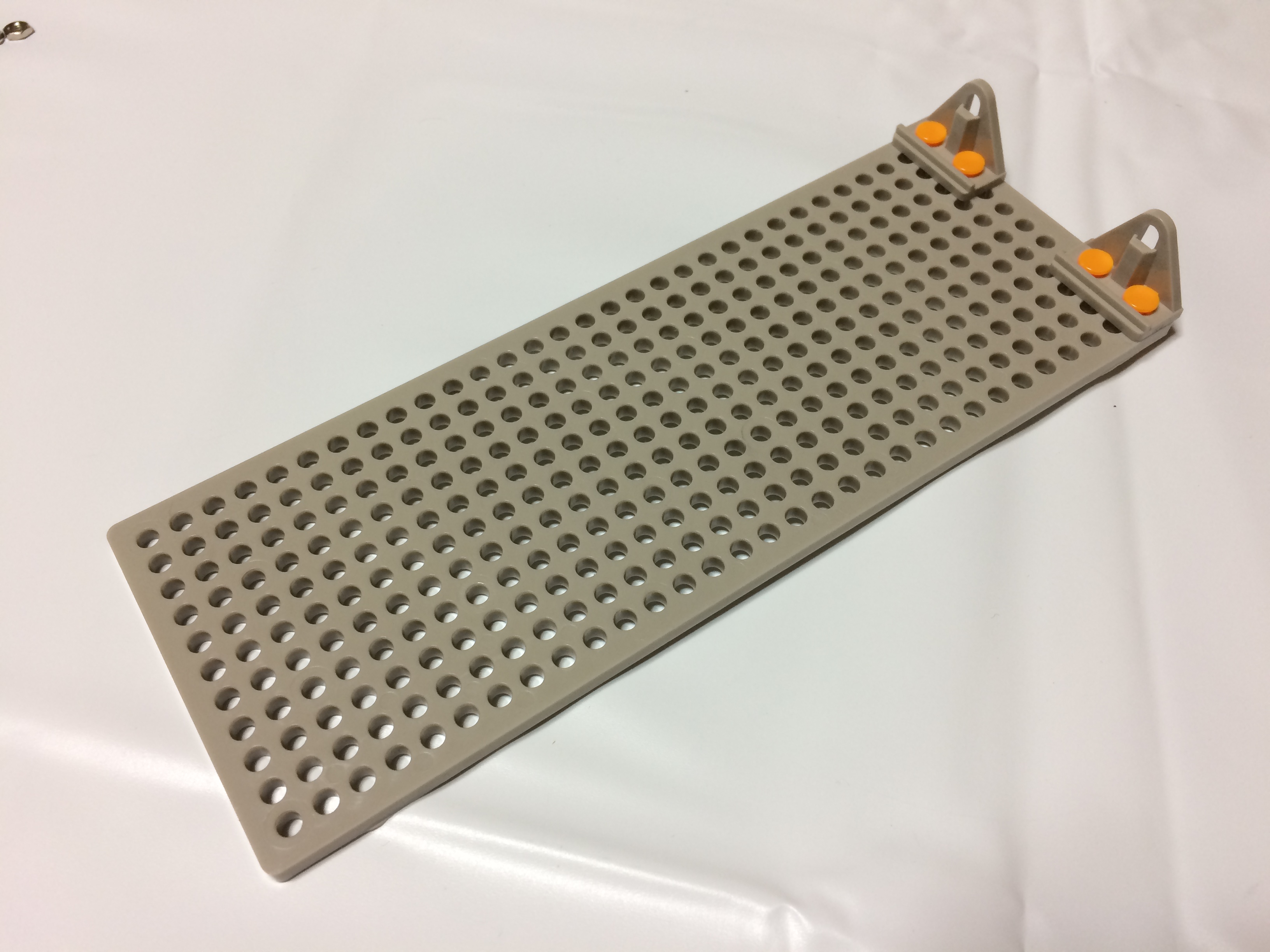
・タミヤ 楽しい工作シリーズNo.157「ユニバーサルプレート2枚セット」1セット
この中で使用するのは次の物。
ユニバーサルプレート2枚、L字型アーム4本、軸受2個、プッシュピン12本、ストッパー12本です。

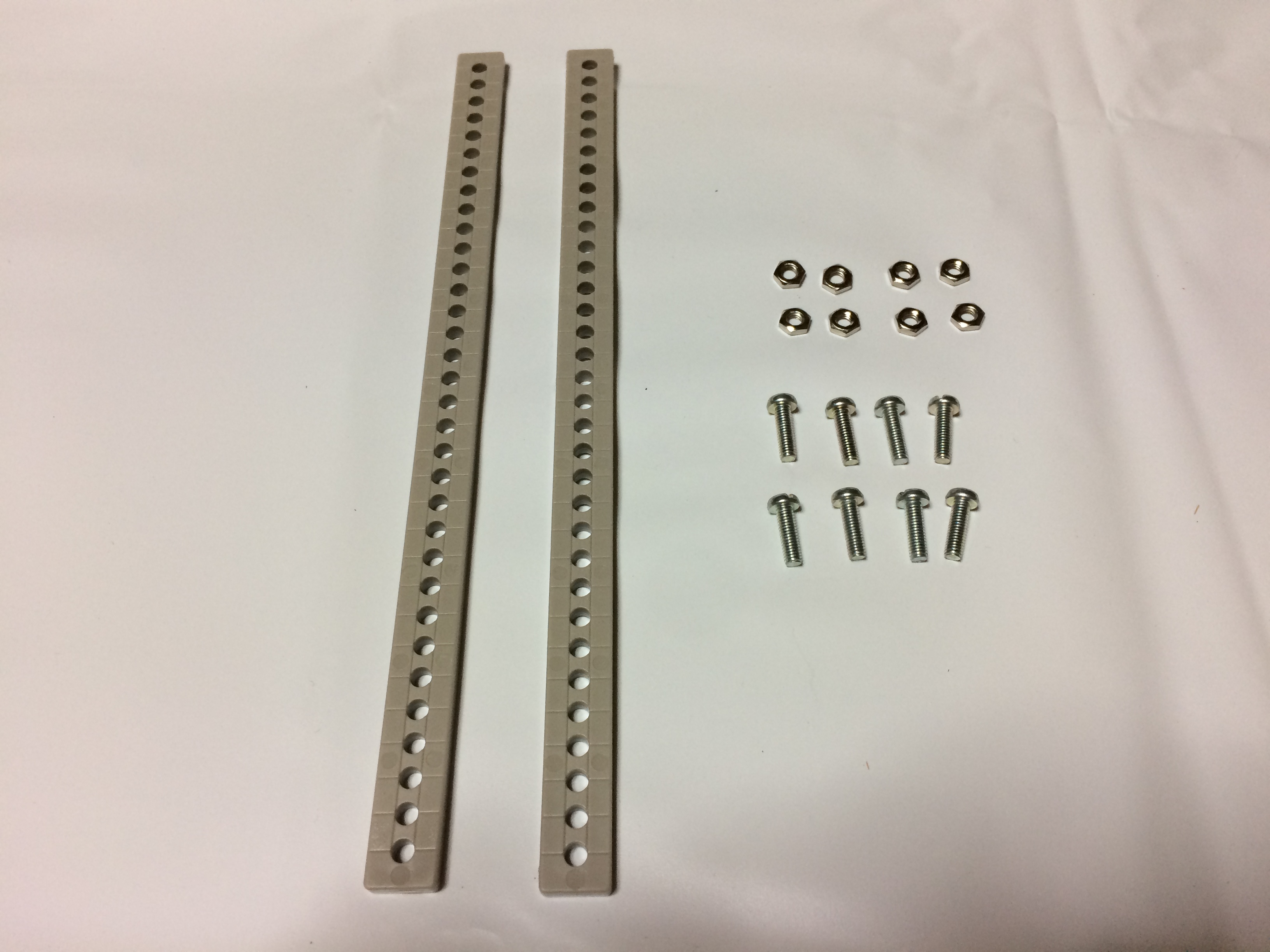
・タミヤ 楽しい工作シリーズNo.143「ユニバーサルアームセット」1セット
実は、本のとおりに購入するとタミヤ 楽しい工作シリーズNo.156「ロングユニバーサルアーム」が正解なのですが、間違えて購入してしまいました。
No.143の方は、余計なパーツが含まれているというだけなので買い換えずに済みました。
この中で使用するのは次の物。
ロングユニバーサルアーム2本、M3×10ビス8本、M3ナット8個です。
・そして、前回使用したアームクローラー工作セットの中に含まれている、M3x8タッピングビス2本
M3x10の丸ビスと間違えないように。タッピングビスの方が長さが2mmばかり短いのと、ネジ山の間隔が広いです。

②パーツを加工する
加工するのはユニバーサルアームです。
4本の同じ長さの短いアームを切り出します。
この長さで2段のプレートの間隔が決まります。
1段目に電池ボックスとモバイルバッテリーを格納するスペースできるように長さを決めます。
私の場合は、モバイルバッテリーの上にポータブルルーターを重ね置きしたいので、本に掲載されているキャタピラ式模型より少し高くなるようにアームの長さを調整しています。
アームをカットする方法は、穴と同じ間隔で刻んである溝に、カッターで少し深めに切れ目を入れて、ポキッと折るだけ。

加工は以上です。
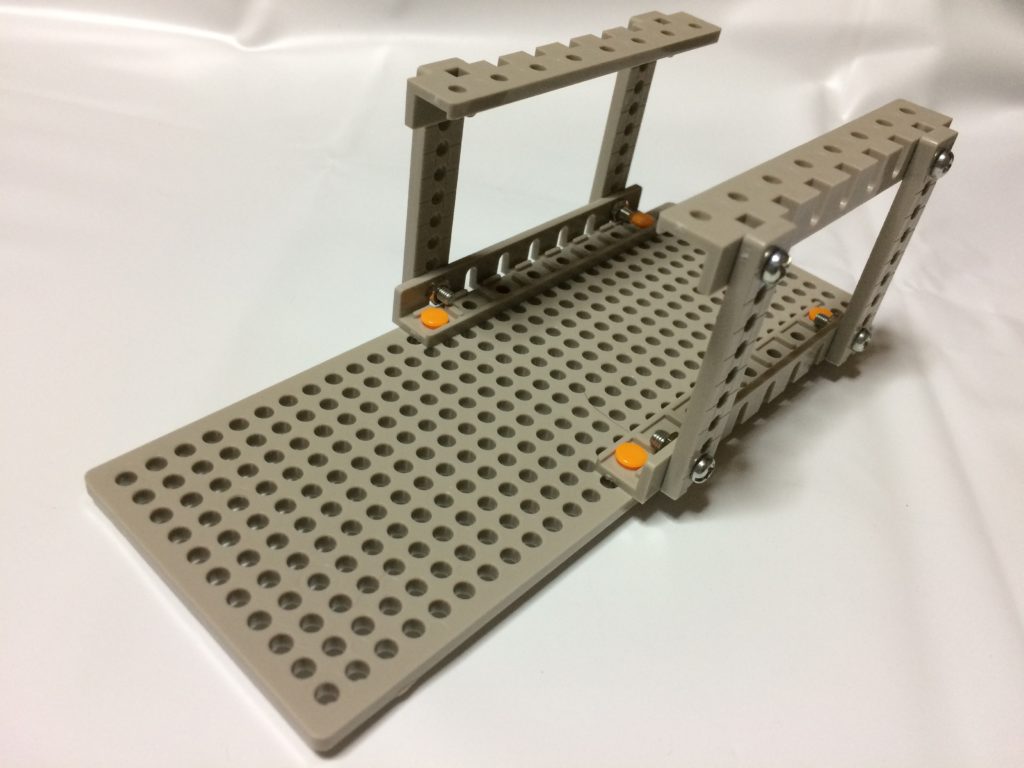
③組み立てる
まず、2段目となるプレートに2つの軸受を、プッシュピンとストッパーで取り付けます。
これは、後からPiカメラを固定するためのものです。
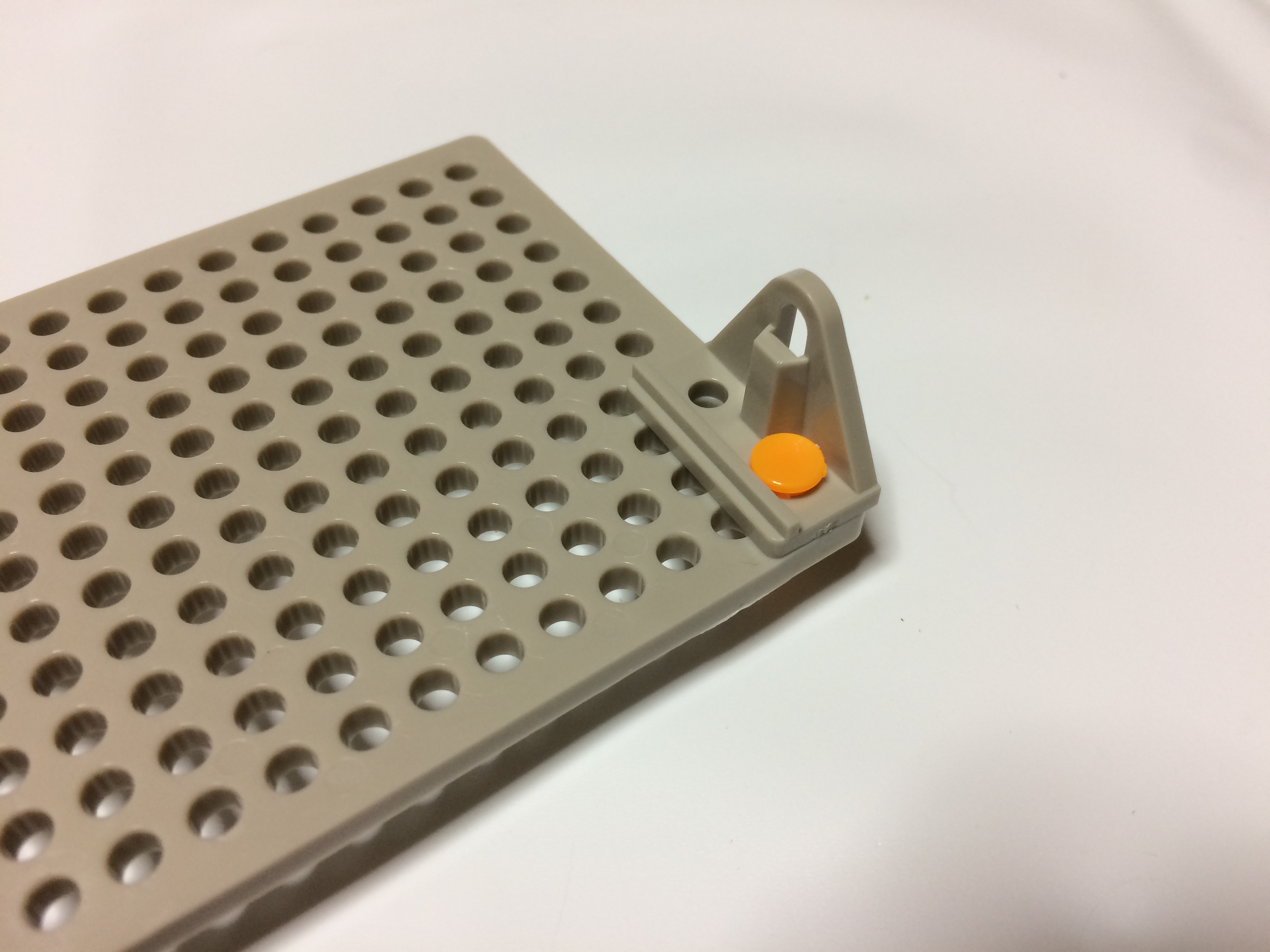
プッシュピンとストッパーは、ストッパーにプッシュピンを半分差し込んで準備しておきます。

これを穴に差し込んで、
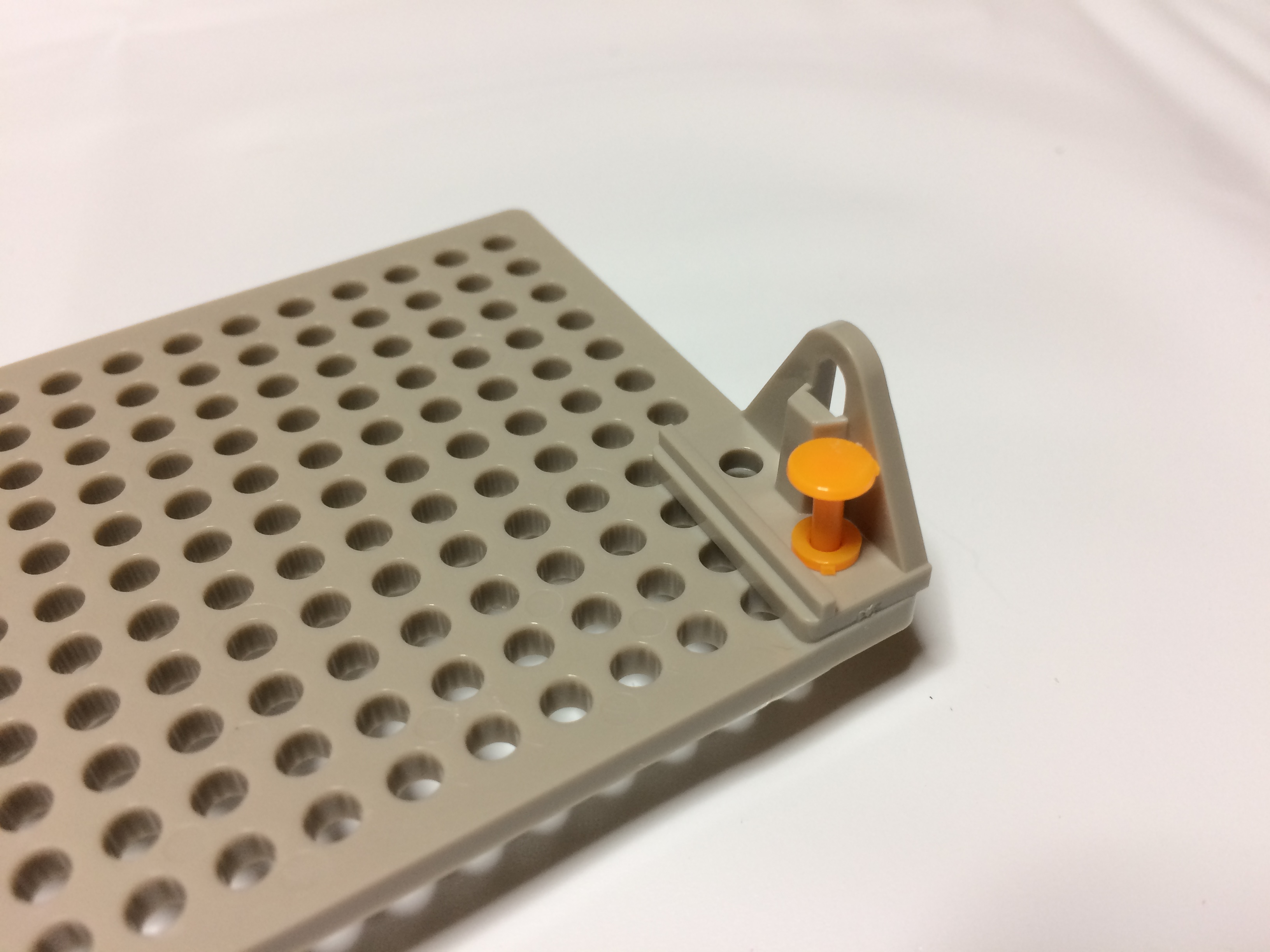
押し込むだけです。
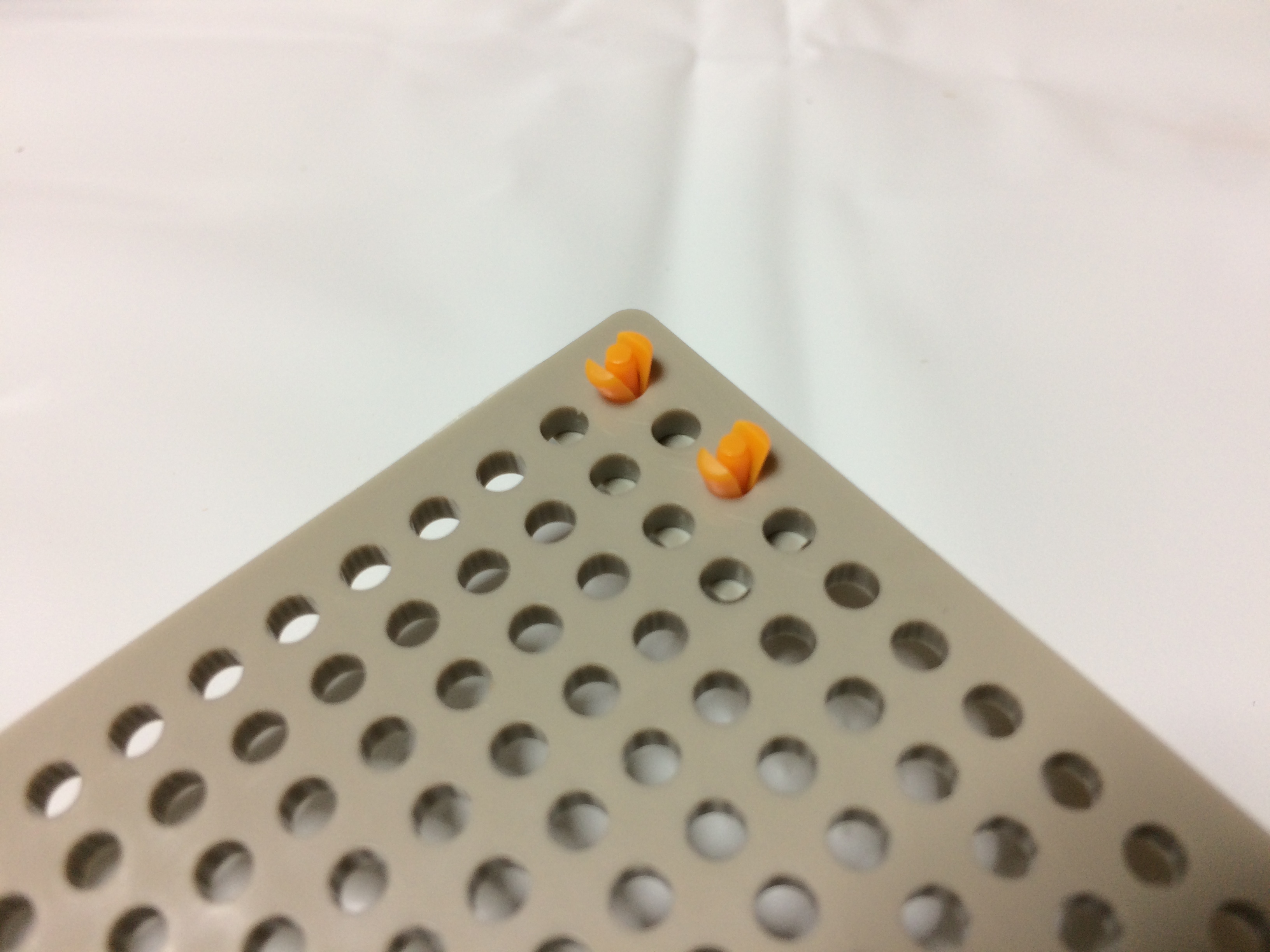
裏から見るとこんな感じ。
これでガッチリ固定できました。
次に、先程加工した、アーム4本と、L字型アーム4本、M3×10丸ビス8本、M3ナット8個で真四角のフレームを2つ作ります。
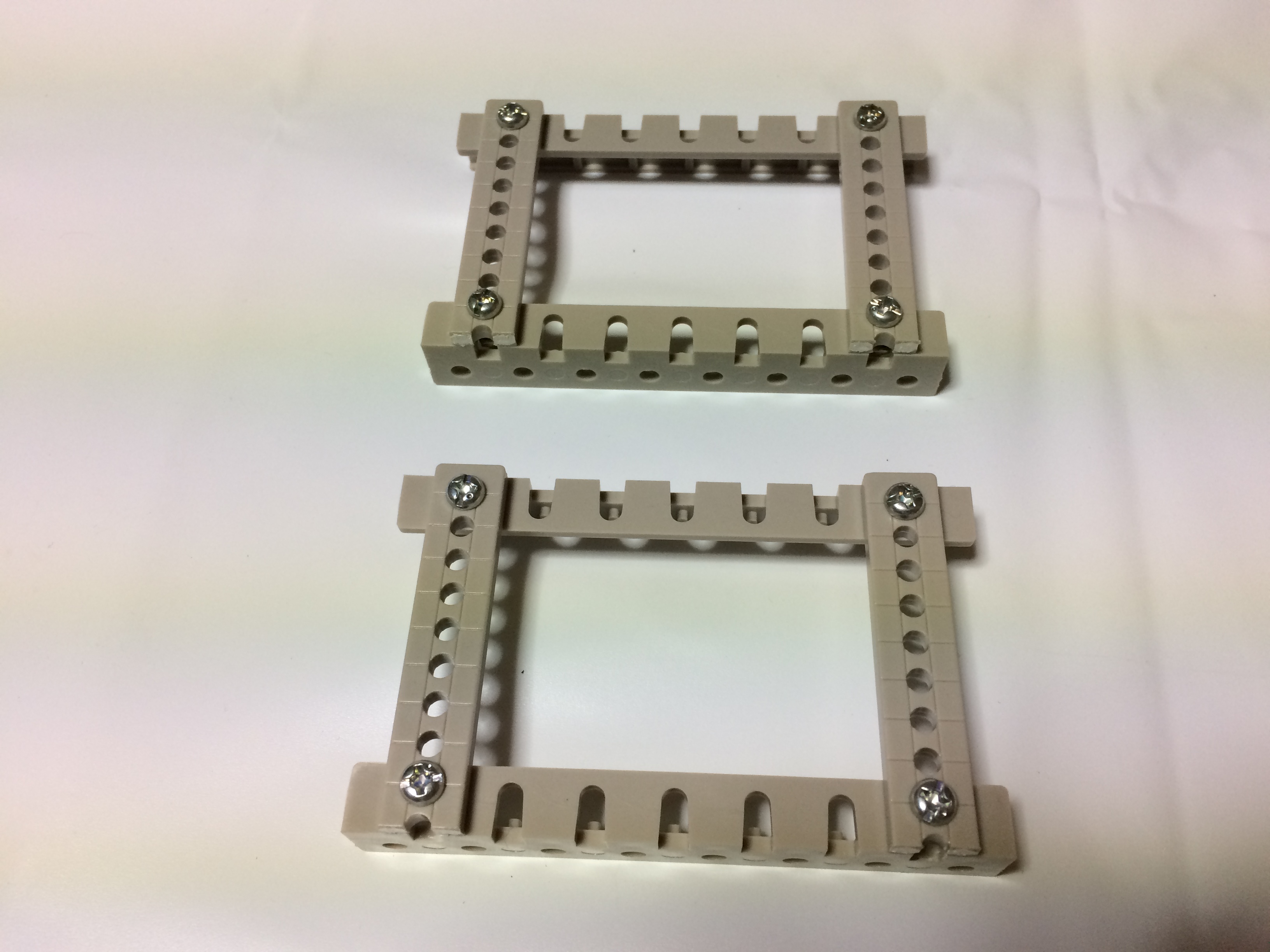
裏から見るとこんな感じ。

これを先に作っておくには理由があります。
先にL字型アームをプレートに取り付けてしまうと、ビスとナットを締め付ける時に非常に苦労します。
この四角のフレーム2個を1段目のプレート(軸受も何も取り付けていない方)にプッシュピン4本とストッパー4本で取り付けます。

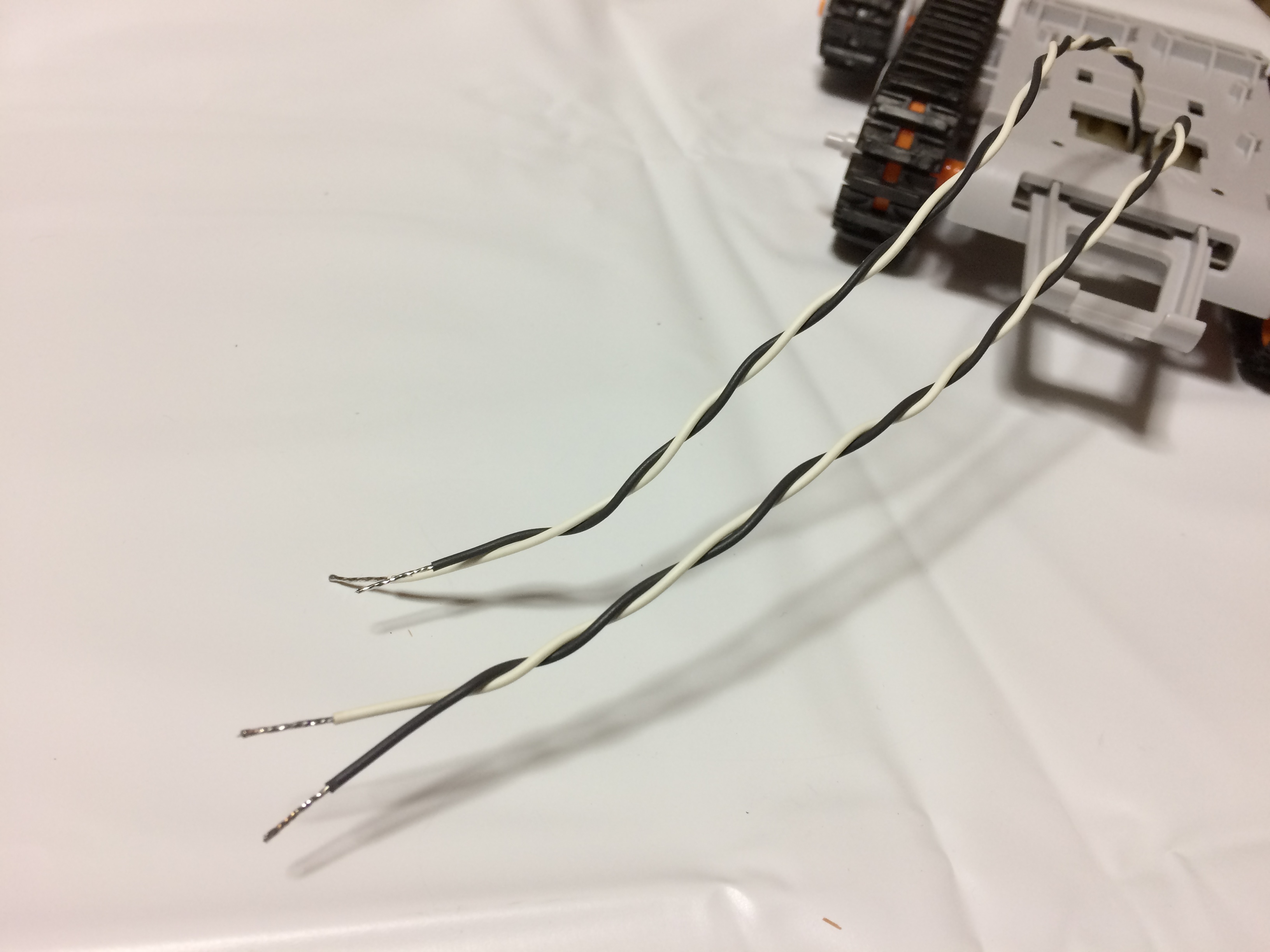
次に、前回で製作したアームクローラーの出番です。
アームクローラーに取り付けたツインモーターの配線をモーター毎によっておいてください。
これは本にも書いていない事なのですが、こうするとノイズ対策にもなる上、配線をつなぐ時に非常にわかりやすくなります。
アームクローラーの上に、先程の側面のフレームが付いた1段目のプレートを取り付けます。
M3x8タッピングビス2本で固定します。
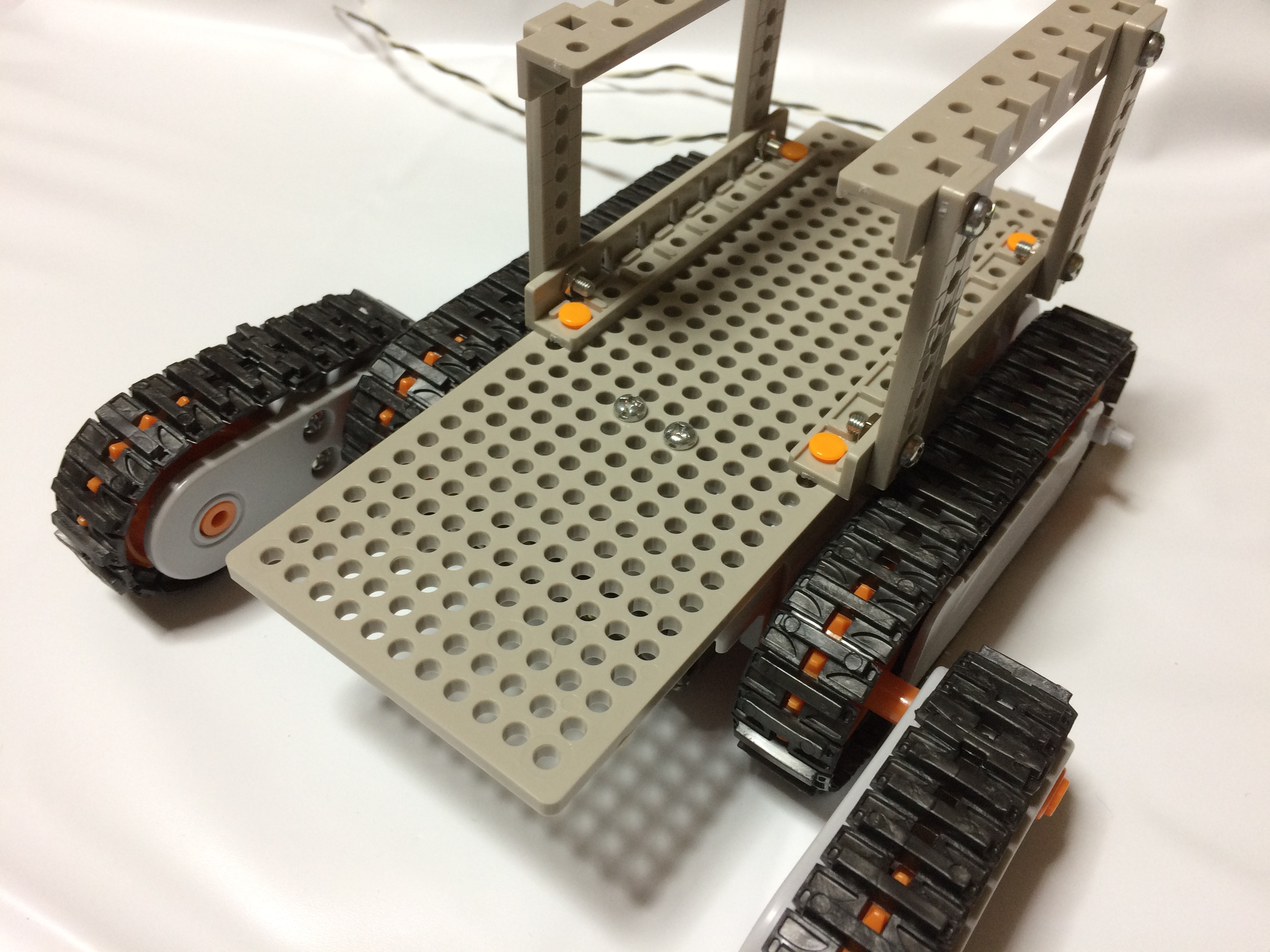
配線は隙間から出るようにしておきます。
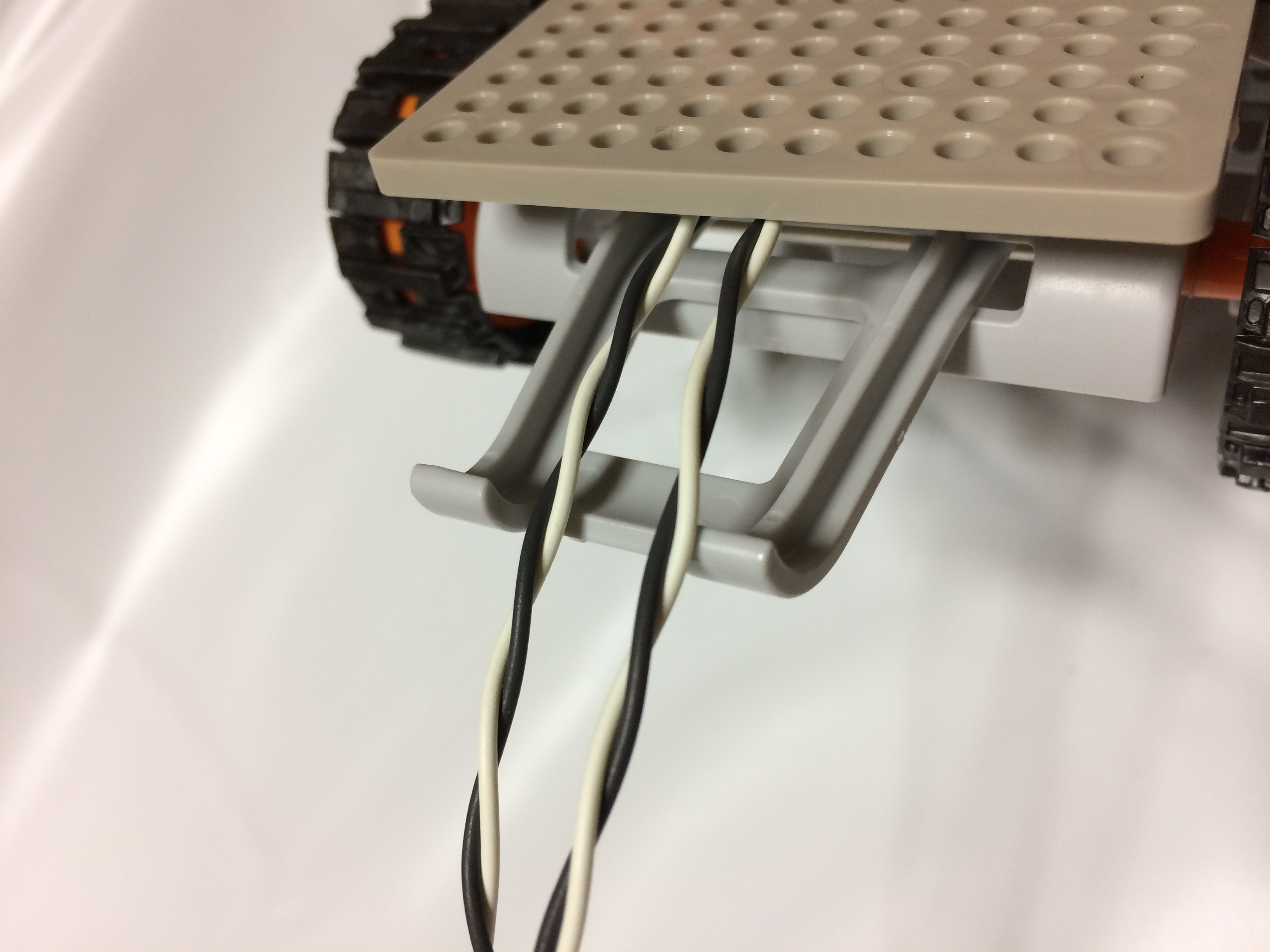
2段目のプレートより先に、1段目をアームクローラーに取り付けたのは、このビスどめができなくなるからです。
そしていよいよ最後の、2段目のプレートの取り付けです。
プッシュピン4本、ストッパー4本で取り付ければ車体の完成です。
では、1段目と2段目の隙間にモバイルバッテリーが入るか試してみましょう。
使用するバッテリーは、以前の記事で紹介したモバイルバッテリーAnker PowerCore 10000です。
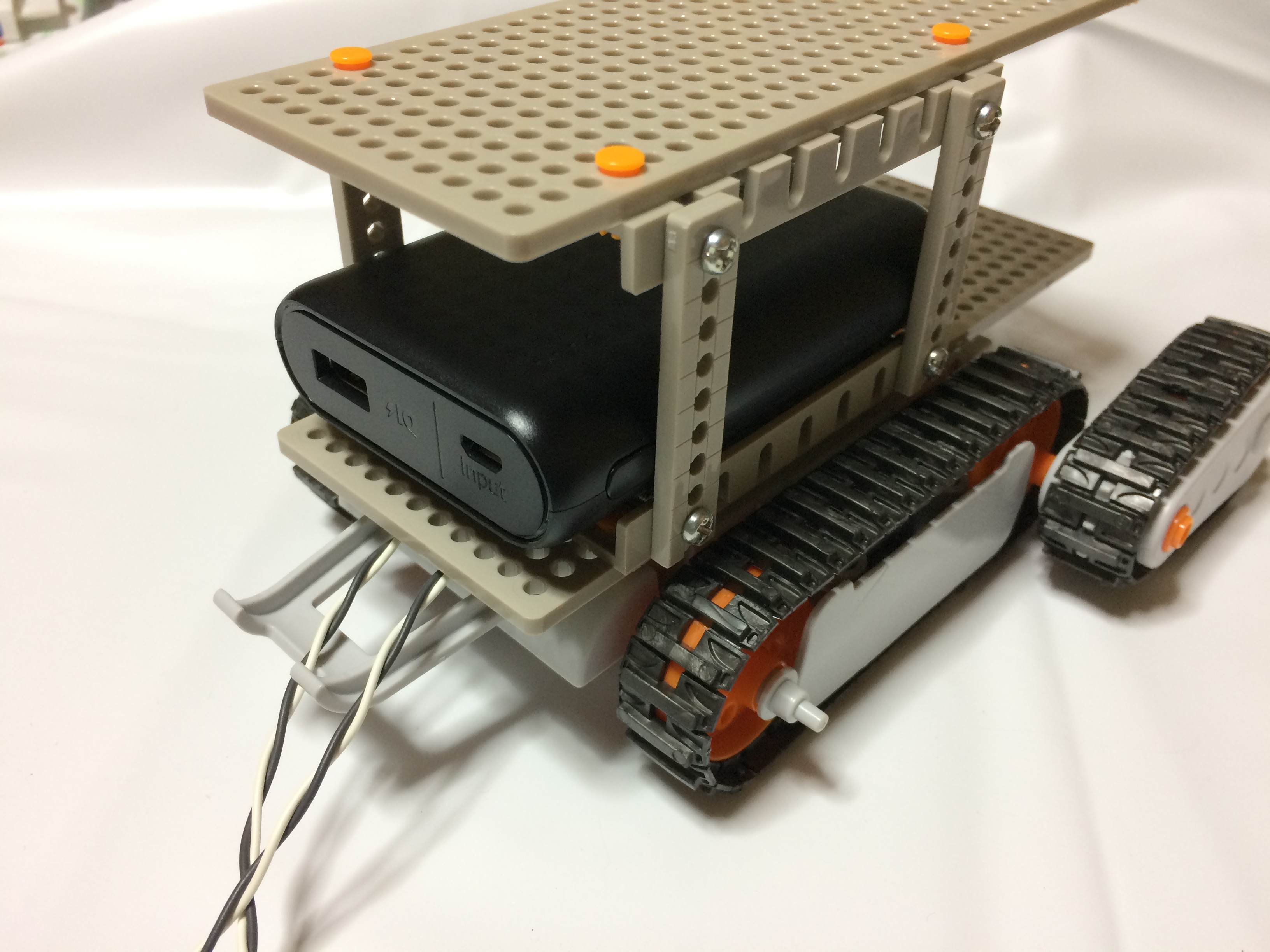
ピッタリ!!
ついでに、これまた以前の記事で紹介したELECOM無線LANポータブルルーターWRH-583BU2-Sも重ねてみました。
いずれ使う可能性が高いので。
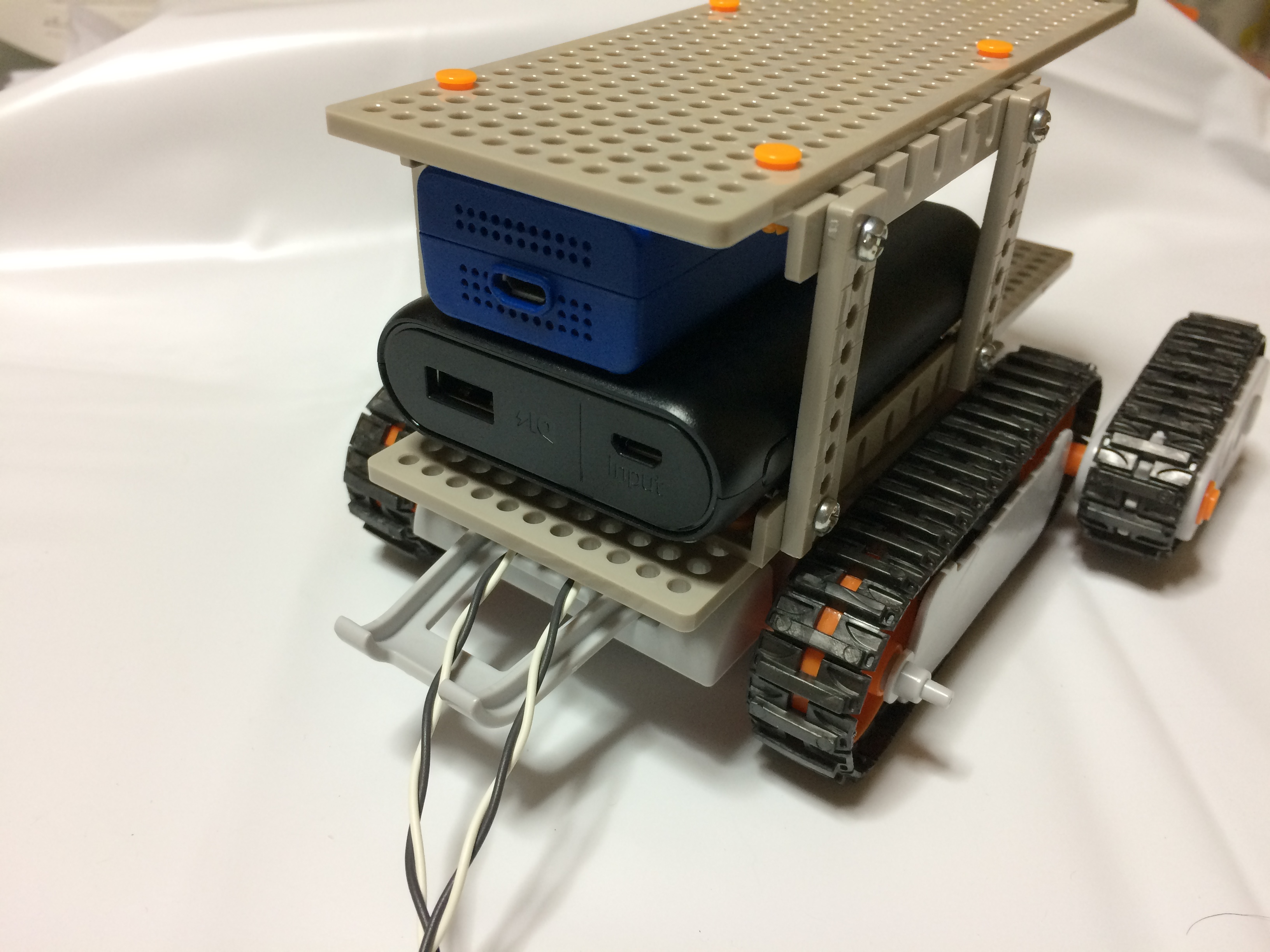
これもまた高さがちょうどよいですね。
キャタピラ式模型の車体製作は以上です。
次はいよいよブレッドボードを使った回路製作に入ります。