Raspberry Pi3搭載 スマホで動く「キャタピラ式模型」製作に挑戦!⑭最終組立てと動作確認
2017/02/26
いよいよキャタピラ式模型の最終組立てと動作確認です。
流れは以下のとおり。
①配線の確認
②プログラムのバグの修正
③車体の最終組立て
④各電源をONにする
⑤Raspberry Piとコントロール端末を同じルーターにWiFi接続する
⑥コントロール端末でブラウザを開き、Raspberry PiのURLにアクセスする
それでは詳細を説明します。
①配線の確認
配線の確認は、「Raspberry Pi3搭載 スマホで動く「キャタピラ式模型」製作に挑戦!⑥回路の製作 その1」の配線図を見ながら1つずつチェックします。
配線を間違えると、動かなかったり、最悪壊れたりする場合があるので、念入りに!
②プログラムのバグの修正
今回は、「Raspberry Piで学ぶ電子工作」のサンプルプログラムをそのままダウンロードして使うので、②については不要です。
でも、ゼロから自分で製作する場合は、プログラムのバグ(プログラムの記述間違い)が必ずあります。
本来は②が一番やっかいな作業になると思います。
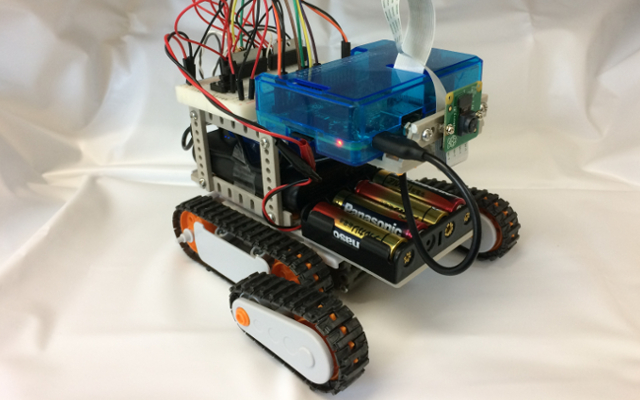
③車体の最終組立て
Raspberry Pi3本体やブレッドボード、モバイルバッテリー、電池ボックスなどを、両面テープやセロテープで、車体に固定します。
配置は、配線に無理が無ければ自分の好みで良いと思います。
④各電源をONにする
・電池ボックスに単三電池4本をセット(DCモーター用)
・充電済みのモバイルバッテリーをRaspberry Piに接続
問題無ければ次へ。
⑤Raspberry Piとコントロール端末を同じルーターにWiFi接続する
Raspberry Piとコントロール端末のWiFiが、同じルーター(SSIDの確認)に接続されている事を確認します。
ルーターが複数あって、どれに接続されるかわからない場合は要注意です。
中継機がある場合も同様です。
私の自宅ではルーターとその中継機があり、家の中のどこにいるかで接続先が自動で変わってしまいます。
そんな場合は、以前の記事で紹介したこんな方法もあります。
→ポータブル無線LANルーターで簡単にRaspberry piのIPアドレスを固定する方法
私が製作したキャタピラ式模型には、上のような事情もあり、ポータブル無線LANルーターを搭載しました。
インターネットにつながっている必要はありません。
キャタピラ式模型のRaspberry Piとコントロール端末(スマホなど)が、同じルーターにWiFi接続されていればOKです。
⑥コントロール端末でブラウザを開き、Raspberry PiのURLにアクセスする
コントロール端末から下記のURLを入力すると、キャタピラ式模型のRaspberry Piにアクセスできます。
Piカメラ無しの場合「http://raspberrypi.local:8000/bb/05/」
Piカメラ有りの場合「http://raspberrypi.local:8000/bb/06/」
ブラウザに表示された各矢印ボタンをクリック、またはタッチして、その方向にキャタピラ式模型が進めば完成です。
もし、まったく違う動きをした場合は、DCモーターからブレッドボードへ来ている配線を差し替えてみてください。
とりあえず、私が製作したキャタピラ式模型の動画をアップしました(撮影が下手でスミマセン)。
コントロール端末はiPadです。
先ほども書いたとおり、このキャタピラ式模型にはポータブル無線LANルーターを搭載しているので、ケーブルの数が多いのがわかると思います。
最後に、動かしてみて気づいた事があります。
障害物を乗り越えるためのアームは要らないかもしれません。
いろいろ搭載して重量オーバーになってしまい、障害物を乗り越える事ができませんでした。